Structure of traffic command system in coal mine
The smart screen is installed above each meeting point in the roadway, and two smart screens are installed at each meeting point, and the installation is in the shape of a V. Towards the two directions of the car, the smart screen of each roadway forms a LAN, and the algorithm processes the status of other meeting points in the trough according to the vehicle conditions captured by the camera, indicating whether the vehicle at the current meeting point passes.
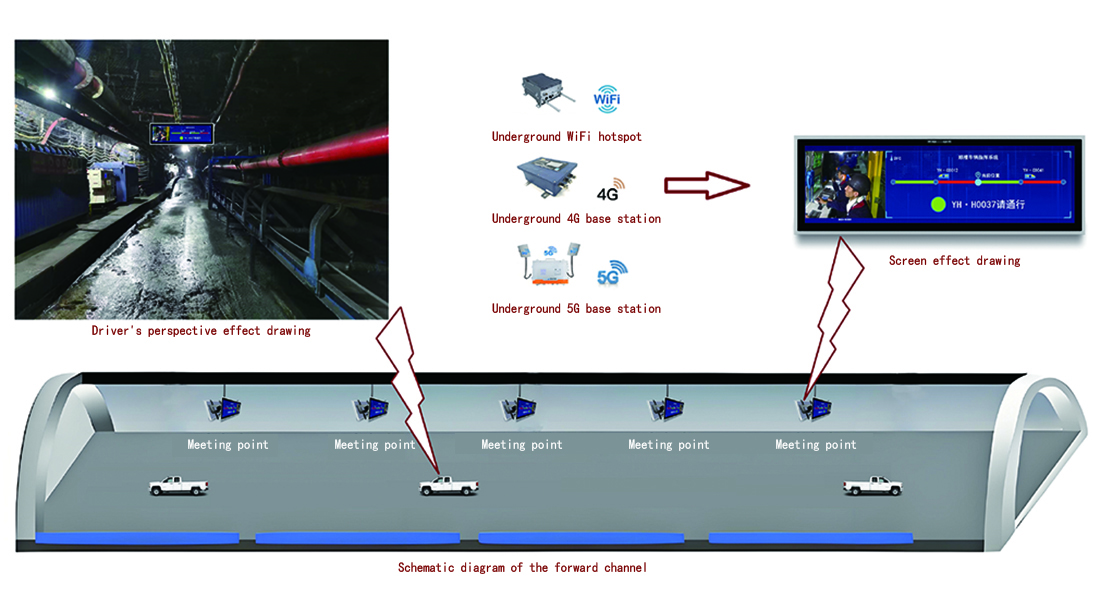
View view of the smart screen camera
The camera can clearly capture the image of the vehicle, and the algorithm automatically identifies the vehicle information and records it into the system for processing. The image display effect is good, the recognition rate is high. The screen interface is rich, and various external cameras can be added for auxiliary recognition to meet the recognition needs of different underground environments.

